
Most advice about robotics in daily life starts in the wrong place. It starts with form factor. Humanoid, home assistant, service bot, smart device. That framing is useful for demos, not for capital allocation.
The better starting point is simpler. Robotics is an operations system attached to a physical workflow. If the workflow is repetitive, constrained, safety-critical, or labor-intensive, robotics may fit. If the workflow changes every hour, depends on tacit human judgment, or lacks clean operational ownership, robotics will disappoint no matter how polished the demo looks.
Your Robotics TLDR and Quick Framework
TL;DR
- Treat robotics in daily life as an engineering and product portfolio decision, not a moonshot. Start where the environment is bounded, the task is measurable, and the fallback to human work is clear.
- Buy autonomy where it already works. Build differentiation where your workflow is unique. Avoid building perception, navigation, and fleet tooling from scratch on day one.
- Staff for reliability, integration, and field ops early. Robotics programs usually fail from weak deployment discipline, not weak model quality.
Who this is for
This is for CTOs, founders, product leads, and heads of engineering who need to decide whether robotics belongs on the roadmap in the next few quarters.
It also fits teams that already know the use case but are stuck on the harder questions. Build or buy. Pilot or wait. Central robotics team or embedded squad. Hardware-heavy roadmap or software-led orchestration layer.
The quick answer
Use this four-part filter before you greenlight any robotics initiative:
Workflow fit
Ask whether the task is physically repetitive, operationally important, and stable enough to automate. Good candidates include internal transport, picking assistance, cleaning, inspection, and constrained material movement.Environment fit
Ask how dynamic the environment is. Robots do better in mapped, semi-structured spaces than in cluttered settings full of edge cases and ad hoc human behavior.Economics fit
Look past the robot itself. Include integration, supervision, maintenance, charging, spares, safety review, and change management. A cheap robot with expensive operations is still an expensive system.Team fit
Be honest about your bench. If you don't have owners for systems integration, data pipelines, field support, and vendor management, your pilot becomes an orphan quickly.
Practical rule: If you can't define success in operational terms within one quarter, you are not ready for a robotics program. You are still in discovery.
A simple scoring rubric
Use a red-yellow-green pass on each line:
- Task repeatability
- Environmental stability
- Safety and compliance clarity
- Integration effort with existing systems
- Fallback process when the robot fails
- Internal owner with decision authority
If three or more lines are yellow or red, delay the build discussion and run a narrower pilot first.
That's the posture that works today. Not "where can we use robots?" but "where can a robotic system produce reliable operational value without heroic supervision?"
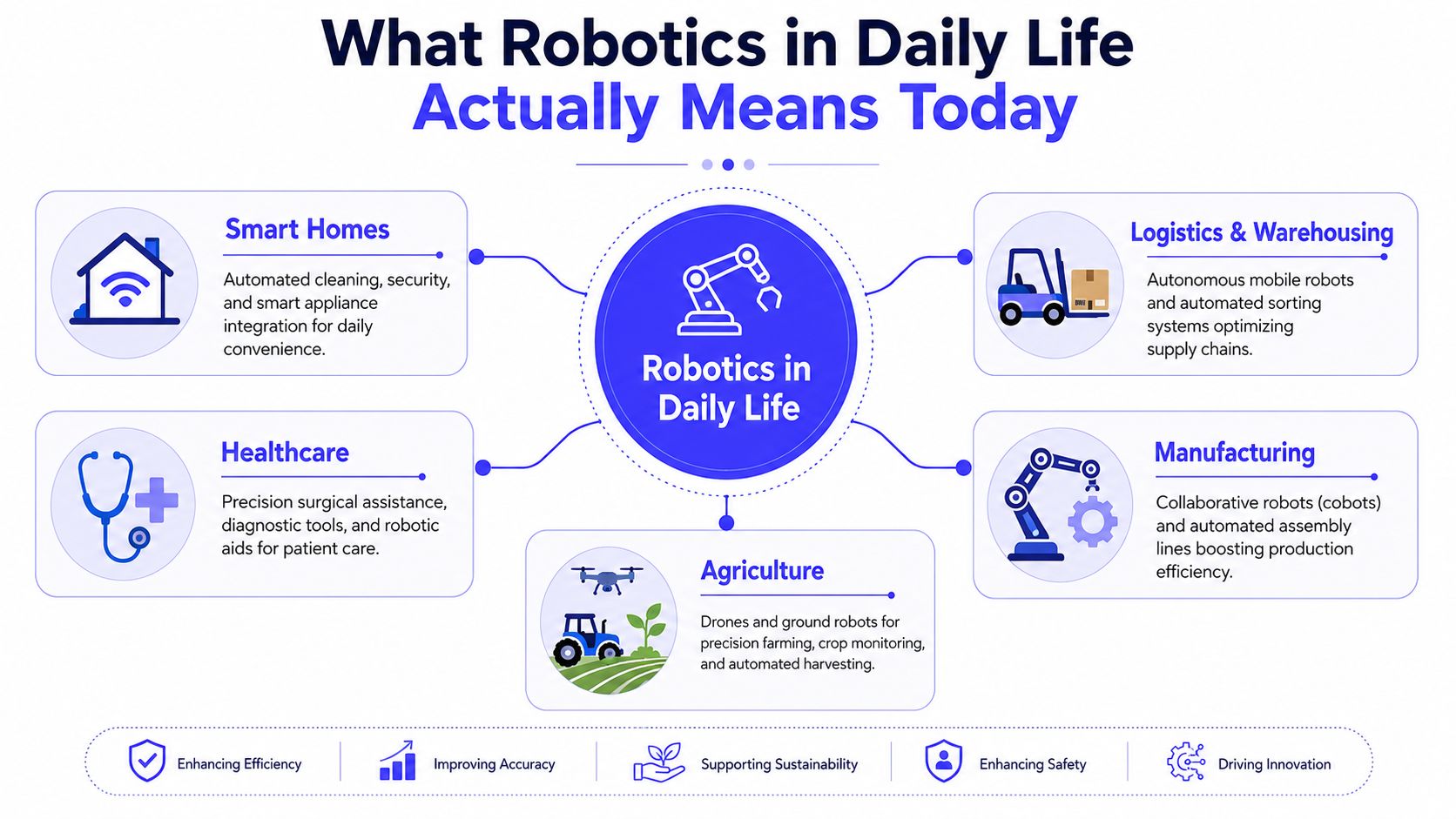
What Robotics in Daily Life Actually Means Today
Daily-life robotics is not a product category. It is an operating layer inside the services, supply chains, and care workflows people already use every day.
That distinction matters for roadmap decisions. Teams waste time debating humanoids, consumer novelty, or broad AI narratives when the near-term opportunity is usually much narrower: a robot that moves inventory between stations, assists staff in a clinic, handles cleaning in a predictable facility, or captures inspection data with fewer missed steps.
According to the International Federation of Robotics, millions of industrial robots are already running in production environments worldwide, and annual deployments remain high. The point for a CTO is straightforward. Robotics is already part of normal operations in manufacturing and logistics, which means the key question is not whether the category is valid. It is whether a specific workflow in your business is stable enough, valuable enough, and staffed well enough to automate.
The part users rarely see
A large share of daily-life robotics sits upstream from the customer. Goods move through robot-assisted production, storage, and fulfillment before anyone opens a box at home. Hospitals use robotic support systems behind the scenes. Facilities teams use robots for cleaning, monitoring, and routine transport without turning that work into a branded experience.
For product and engineering leaders, that changes the staffing model. The first hires are rarely industrial designers building a new consumer device. They are systems engineers, integration leads, field operators, safety owners, and product managers who can translate an operational pain point into a controlled deployment.
In practice, the strongest programs treat robotics as part of the broader IoT application development strategy for connected operational systems, because telemetry, device management, exception handling, and service workflows usually determine whether the robot helps the business or creates another support burden.
Where leaders should look first
The practical categories are well established:
- Intralogistics and storage where robots move, stage, retrieve, or replenish goods in controlled facilities
- Service operations such as floor care, delivery, and routine transport in hospitals, hotels, and campuses
- Inspection and monitoring where repeatable capture beats inconsistent manual checks
- Assistive workflows where robots reduce strain, time-on-task, or error rates without removing human oversight
Warehouse programs are a good example. The ROI often comes from throughput, slotting discipline, labor redeployment, and fewer process interruptions, not from replacing people outright. Teams evaluating automated storage should look at system fit, software integration, and serviceability as closely as the hardware itself. Material Handling USA's ASRS solutions are one example of how this category is being packaged for real warehouse operations.
A more useful mental model
Daily-life robotics works across three operating layers:
| Layer | What it includes | Why leaders should care |
|---|---|---|
| Physical work | Mobility, grasping, sensing, task execution | Sets the ceiling on what the system can do reliably |
| Operational control | Scheduling, fleet management, alerting, exception routing | Drives utilization, uptime, and supervisor workload |
| Human ownership | Training, escalation paths, maintenance, process redesign | Determines whether the deployment sticks after the pilot |
This is also where many roadmaps fail. The hardware team proves the robot can complete the task. The operations team then discovers the bottleneck is handoff logic, charging discipline, bad inventory data, unclear ownership, or no plan for failure recovery.
As noted earlier, industry groups such as the IFR have also pointed out that the benefits of everyday robotics will not arrive evenly across sectors or populations. That is not a side issue. It affects where demand forms first, which buyers can justify deployment, and how teams should prioritize features for supervision, accessibility, and mixed human-robot workflows.
The better framing is simple: daily-life robotics is applied operations engineering. The winning roadmap starts with one painful workflow, one accountable team, and one deployment environment where reliability can be measured week by week.
The Core Technologies Driving Modern Robotics
The CTO version of the robotics stack can be reduced to three pillars. Perception, cognition, and action. If a vendor can't explain all three clearly, the system probably won't hold up in production.
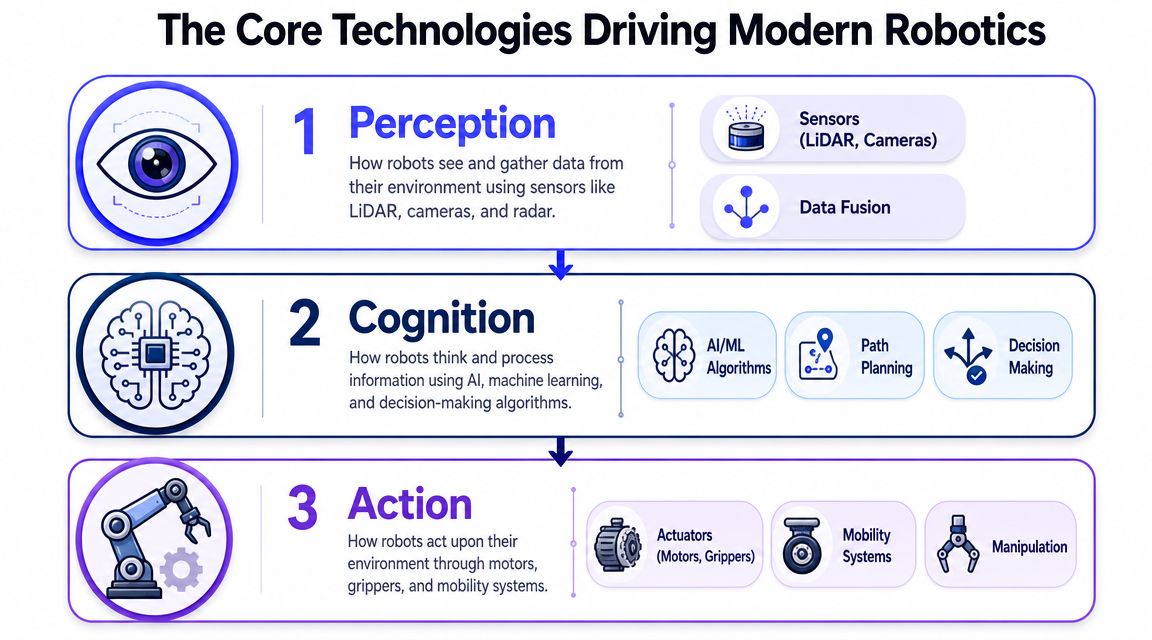
Perception
Perception is how the robot senses the world. In practical systems, that usually means some mix of cameras, LiDAR, encoders, inertial sensors, proximity sensors, or force feedback.
The strongest near-term gains in daily-life robotics are coming from autonomous mobile robots (AMRs) that combine LiDAR or camera perception with simultaneous localization and mapping (SLAM) and dynamic obstacle avoidance. In warehouses, that stack supports order fulfillment and internal transport. In homes, a related autonomy stack supports vacuuming, mopping, and similar chores (HP on everyday robotics).
Cognition
Cognition is the decision layer. Not consciousness. Not science fiction. Just the planning logic that answers three practical questions:
- Where am I?
- What should I do next?
- How do I avoid making the situation worse?
For AMRs, the engineering payoff is straightforward. Fleets can replace rigid fixed-path systems with more flexible routing because they can move through changing spaces and avoid collisions in real time.
This is why warehouse leaders increasingly compare robot fleets against static conveyors, not just against human labor. In some settings, the more relevant benchmark is layout flexibility. Teams evaluating automation often pair AMRs with storage systems such as Material Handling USA's ASRS solutions when they need tighter coordination between storage density and robot movement.
Action
Action is where software meets hardware. Motors, grippers, wheels, lifts, actuators, drive systems.
This is the layer that punishes sloppy architecture. A perception model can be impressive in a notebook. Action has to work around wheel slip, dead batteries, floor transitions, blocked aisles, bad bins, and human unpredictability.
For leaders used to pure software, robotics needs one mindset shift. You are not shipping a feature. You are shipping a cyber-physical service.
Your architecture needs two loops. The robot control loop for milliseconds, and the operations loop for exceptions, monitoring, and retries.
That second loop is where many teams underinvest. If you already think about connected devices, observability, and field integration, this is close to the discipline behind IoT application development. Robotics just raises the bar because failures happen in the physical world.
What works today
A useful shorthand:
- Works well now: navigation in bounded spaces, internal transport, repeatable cleaning, guided picking assistance
- Works with caution: mixed human-robot environments with variable traffic
- Still fragile: generalized manipulation in messy spaces, low-supervision task switching, rich context understanding
That distinction helps when you write job descriptions, evaluate vendors, and choose where to place your first bets.
Real-World Examples of Robotics ROI
The easiest way to get robotics wrong is to evaluate it as a technology purchase. The right lens is workflow economics.
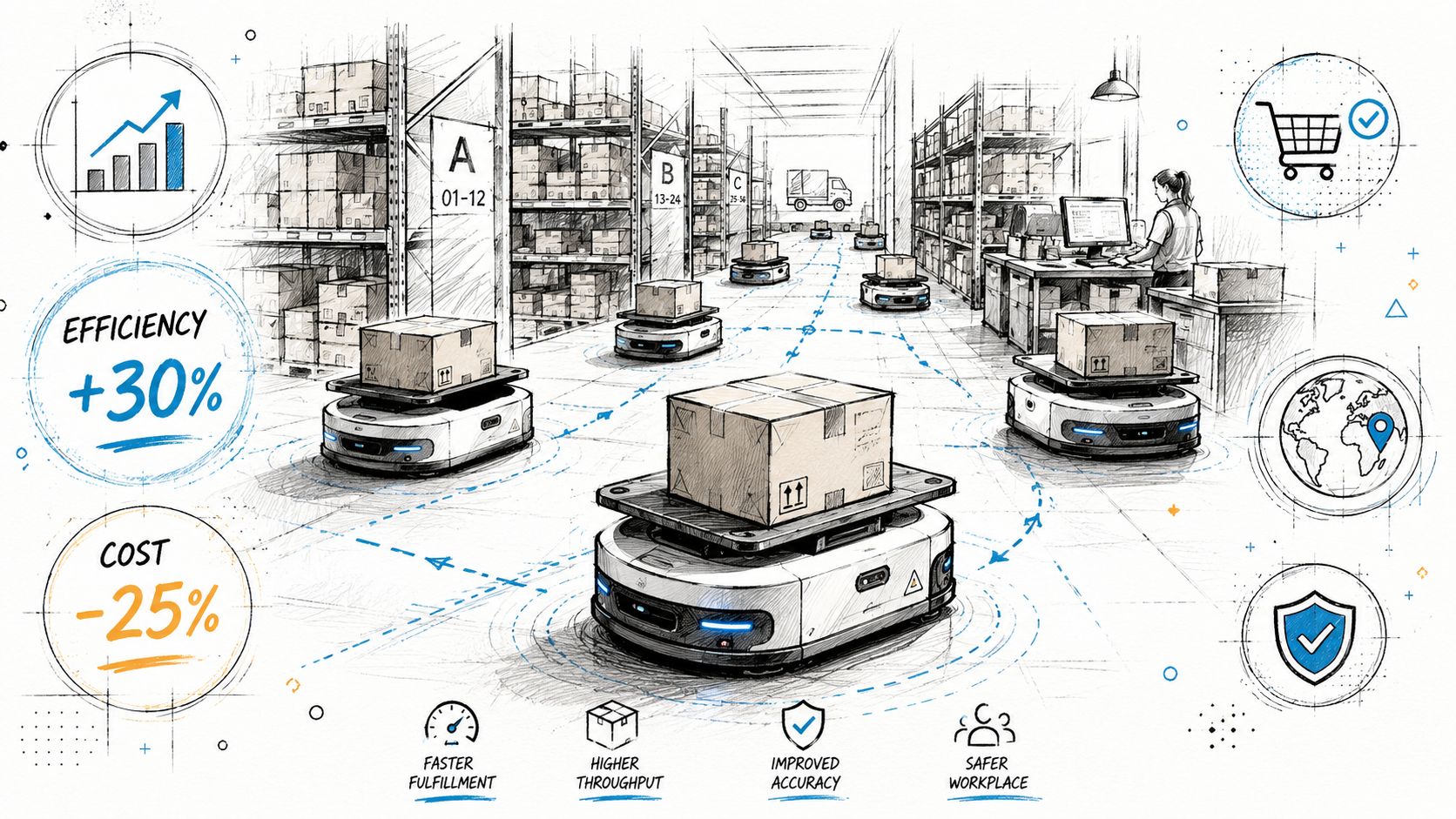
Example one, an e-commerce warehouse mobility rollout
A mid-sized e-commerce operator has a familiar problem. Fast growth, uneven seasonal demand, congested pick paths, and too much worker time spent walking inventory between zones.
The robotic answer is not a fully autonomous warehouse from day one. It is usually a staged AMR rollout focused on internal transport and picker assist.
What changed operationally
- Pickers stayed in tighter zones
- Robots handled tote movement and replenishment runs
- Supervisors used a fleet dashboard to reroute around blocked aisles
- Warehouse management system integration stayed narrow at first
What leaders should measure
| Before pilot | After pilot target |
|---|---|
| Walking-heavy workflows | More time spent on value-add picking |
| Congested transfer paths | Smoother internal movement |
| Manual reallocation during peaks | Software-assisted task balancing |
What works in this setup is narrow scope. Don't start with custom manipulation or full-facility orchestration. Start with movement.
A strong review process also looks at the surrounding equipment and layout constraints. If your team needs a practical primer on adjacent automation choices, this guide to material handling solutions is useful context before you spec the robotics layer.
Example two, a retail inventory robotics program
Now switch environments. A retailer wants better shelf visibility, fewer missed replenishment opportunities, and less staff time spent on repetitive scanning.
A store robot can patrol fixed routes, identify missing or misplaced inventory, and feed issues into the existing operations queue. The point is not labor replacement in the abstract. The point is better stock execution with less manual drudgery.
Mini-case structure
- Business problem: poor on-shelf visibility and inconsistent audit routines
- Robotic role: recurring store scans and exception detection
- Human role: validate exceptions, replenish, handle customer-facing tasks
This kind of deployment tends to work when the robot is clearly subordinate to store operations. It should surface action items, not invent a parallel process.
The cleanest ROI usually comes when the robot removes low-value motion or repetitive checking, while humans keep judgment-heavy work.
What both examples have in common
The pattern is consistent across daily-life robotics programs that survive past the pilot stage:
- The task is narrow.
- The environment is at least partly structured.
- The handoff to people is explicit.
- The metrics are operational, not theatrical.
If your business case depends on a robot behaving like an unsupervised employee across changing conditions, you are betting on research. If it depends on reducing friction in one repeatable workflow, you are building a business system.
Your Robotics Roadmap A Decision Framework
The highest-cost robotics mistake is not choosing the wrong vendor. It is choosing the wrong mode of execution.
Leaders usually have three options. Build. Buy. Partner. The right answer changes by use case, maturity, and how much proprietary value lives in your workflow.
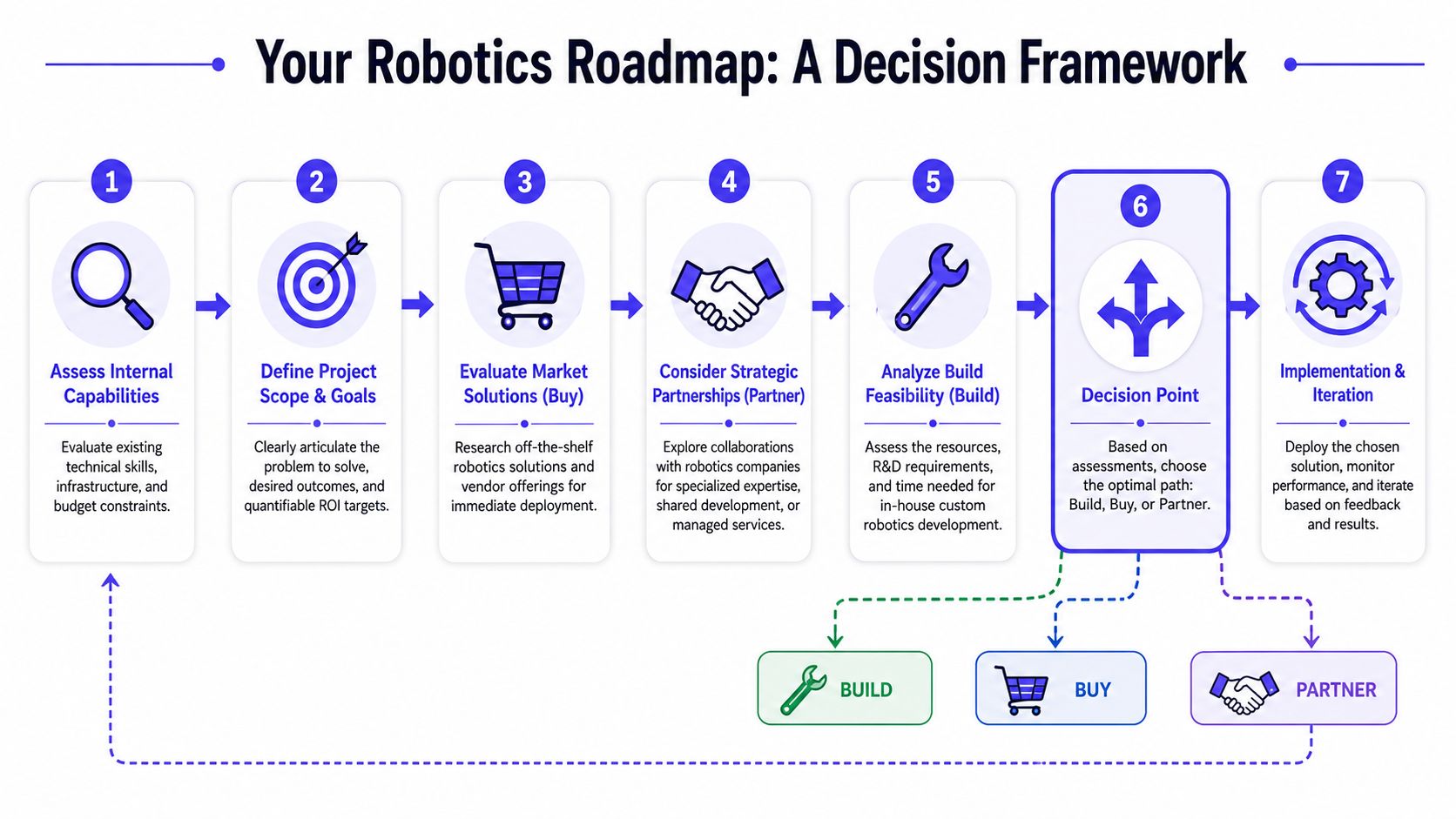
Step one, define the operational problem
Don't start with the robot category. Start with the business bottleneck.
Examples:
- internal transport delay
- inconsistent cleaning quality
- slow cycle counts
- safety issues around repetitive movement
- poor service consistency in a fixed environment
Write the problem in one sentence. If the sentence starts with "We want to use robotics," rewrite it.
Step two, classify the environment
Use this quick test:
| Environment type | Typical answer |
|---|---|
| Fixed and mapped | Buy first |
| Semi-structured with known exceptions | Partner or buy with customization |
| Highly variable and workflow-specific | Build selected components only |
Step three, choose the execution mode
Buy when the autonomy is already commoditizing
Use vendors when the core capability is established. AMR navigation, fleet dashboards, charging workflows, and standard safety tooling usually fit here.
Your team should still own integration, process redesign, and acceptance criteria. Buying software does not outsource accountability.
Partner when the use case is important but not core IP
This is the middle path many organizations underestimate. You keep product direction and operational control while leaning on specialist robotics talent for implementation.
For leaders shaping internal ownership, this overview of Sheridan Tech for robotics leadership is a useful reference point for how mature robotics orgs think about leadership depth and delivery responsibility.
Build when the differentiation is in your workflow
Build only if one of these is true:
- your environment is unique enough that off-the-shelf products fail
- the perception or manipulation problem is central to your moat
- you expect robotics to become a product capability, not just an internal tool
Even then, avoid building the whole stack. Teams should generally not build hardware abstraction, safety systems, fleet dashboards, telemetry, and perception models all at once.
This video gives a decent lens on how leaders can think about sequencing robotics decisions in practice.
A practical decision checklist
- Can an off-the-shelf system handle the task with light configuration?
- Is the value in execution or in proprietary workflow intelligence?
- Do you have enough internal engineering maturity to support field failures?
- Will robotics become a reusable capability across sites or products?
If you need a broader planning artifact for sequencing technical initiatives and ownership, this AI implementation roadmap is a useful companion model.
What experienced teams do
They buy commodity layers, partner through uncertainty, and build only where repeated learning compounds.
That approach is less glamorous. It is also how you avoid turning a pilot into a stranded science project.
How to Hire and Structure a Robotics Team
The first robotics hires should reduce delivery risk, not increase technical novelty.
That means you need people who can ship in messy reality. Bring-up, debugging, integration, edge cases, telemetry, field support. The strongest robotics teams are usually more disciplined than flashy.
The foundational roles
For most companies, the first durable team includes three profiles:
- Robotics Software Engineer for autonomy integration, middleware, and systems behavior
- Perception Engineer for sensor fusion, localization, vision pipelines, and environment understanding
- MLOps for Robotics for fleet telemetry, model deployment, data workflows, and observability
If you are earlier than that, start with one robotics generalist plus one strong platform or infrastructure engineer. Then add specialization only after the pilot proves worth.
Robotics team skill matrix
| Skill / Competency | Robotics Software Engineer | Perception Engineer | MLOps (Robotics) |
|---|---|---|---|
| ROS and middleware | Strong | Working knowledge | Working knowledge |
| C++ or systems programming | Strong | Strong | Moderate |
| Python tooling | Strong | Strong | Strong |
| Sensor integration | Strong | Strong | Moderate |
| Computer vision | Moderate | Strong | Moderate |
| SLAM and localization | Moderate | Strong | Moderate |
| Fleet telemetry | Moderate | Moderate | Strong |
| CI/CD for robot software | Moderate | Moderate | Strong |
| Data pipelines and labeling ops | Moderate | Strong | Strong |
| Field debugging | Strong | Strong | Moderate |
Interview questions that expose real experience
Robotics Software Engineer
- Tell me about a deployment failure you diagnosed on real hardware. What did telemetry show, and what changed after the fix?
- How would you design fallback behavior when navigation confidence drops mid-task?
- What parts of a robotics stack should remain deterministic even if perception uses learned components?
Perception Engineer
- Where have you seen sensor fusion fail in production?
- How do you decide when a perception problem needs more data versus better assumptions?
- Walk through your approach to localization drift in a semi-structured environment.
MLOps for Robotics
- How would you version models, maps, and robot software across a fleet?
- What signals would you monitor to catch silent degradation before operators report incidents?
- How do you handle rollback when the failure is intermittent and site-specific?
Hire people who can explain trade-offs in deployment language, not just model language.
Central team or embedded team
Use a central team when the company is still building shared platform capability. Use embedded robotics engineers when one product line or facility has a strong, ongoing roadmap.
A common pattern that works:
- central platform ownership for autonomy, fleet tooling, and reliability
- embedded product or operations partners for workflow fit and site adoption
If your team needs a practical primer before hiring, this guide on how to program robots is a useful baseline for scoping the stack and role expectations.
Key Challenges and Strategic Next Steps
Consumer interest gets attention. Operational discipline decides whether a robotics program survives budget season.
The constraint is not raw capability. It is whether the system can keep performing in messy, changing environments with acceptable support cost. As noted earlier, daily-life robotics today is mostly semi-autonomous. People still cover edge cases, supervise recovery, and step in when confidence drops. Teams that plan for that reality ship faster and waste less capital than teams that chase full autonomy in the first release.
The harder problem for leadership is organizational. Robotics failures rarely come from one bad model or one weak component. They come from unclear ownership, weak site adoption, poor exception design, and no agreement on what "good enough" means in production.
The challenges leaders underestimate
Brittleness shows up after the demo
Controlled tests obscure actual failure modes. Clutter, changed lighting, moved fixtures, damaged labels, and inconsistent human behavior all create edge cases that can swamp a pilot if the workflow was scoped too tightly.Hardware slows every mistake
In software, a bad release is painful. In robotics, a bad release can stop a line, create safety risk, or send technicians on-site. Test cycles are slower, root-cause analysis takes longer, and rollout discipline has to be tighter.Exception handling is part of the product
A robot that works 90 percent of the time but fails messily can still destroy ROI. Good systems fail in a way operators can understand, recover, and support without calling engineering for every incident.Team design determines delivery speed
If product owns the roadmap, engineering owns autonomy, and operations owns uptime, someone still needs end-to-end accountability. Without that, pilot issues sit in queues while confidence in the program drops.
Three next steps worth doing now
Run a one-week Gemba review of physical workflows
Watch where workers pause, re-handle items, wait for handoff, correct errors, and escalate exceptions. Those moments usually define both the value case and the integration risk.Pick a pilot with a human fallback and a narrow success metric
Good first deployments reduce labor on a repetitive step, improve consistency, or extend operating hours. They do not depend on perfect perception, perfect navigation, or a full site redesign.Set operating rules before you meet vendors
Name a single program owner. Define what counts as success in business terms, not demo terms. Decide who supports incidents, who approves rollouts, and what telemetry the team will review weekly.
One more point matters. Roadmap quality depends on staffing quality. If the team does not include someone who can connect perception, controls, fleet software, and site operations, the program will drift into vendor theater or research projects that never reach steady-state use.
Robotics pays off for teams that scope tightly, measure reliability early, and build around real operating constraints. The winners usually start with one boring workflow they can support well, then expand after the team has earned trust.
If you're planning robotics, AI, or automation initiatives and need senior engineers who can scope, integrate, and ship production systems, ThirstySprout can help you build the right team fast. You can Start a Pilot, validate the roadmap with experienced operators, and bring in vetted talent for autonomy, MLOps, perception, and platform engineering.
Hire from the Top 1% Talent Network
Ready to accelerate your hiring or scale your company with our top-tier technical talent? Let's chat.